Eigen
Based on the lecture “Mathematics for Artificial Intelligence (2022-1)” by Prof. Yeo Jin Chung, Dept. of AI, Big Data & Management, College of Business Administration, Kookmin Univ.

Eigen
-
정방행렬 $\mathbf{A} \in \mathbb{R}^{N \times N}$ 로 선형 변환하였을 때 그 방향은 변하지 않고 길이만 변하는 벡터를 $\mathbf{A}$ 의 고유벡터(Eigen Vector), 이때 길이의 변화량을 고유값(Eigen Value)이라고 정의함
\[\begin{gathered} \mathbf{A}\mathbf{v} = \lambda\mathbf{v},\quad \mathbf{v}\ne\mathbf{0}\\ \Updownarrow \\ \begin{bmatrix} a_{1,1} & a_{1,2} & \cdots & a_{1,N}\\ a_{2,1} & a_{2,2} & \cdots & a_{2,N}\\ \vdots & \vdots & \ddots & \vdots\\ a_{N,1} & a_{N,2} & \cdots & a_{N,N}\\ \end{bmatrix} \begin{bmatrix} v_{1}\\ v_{2}\\ \vdots\\ v_{N}\\ \end{bmatrix} = \lambda \begin{bmatrix} v_{1}\\ v_{2}\\ \vdots\\ v_{N}\\ \end{bmatrix} \end{gathered}\]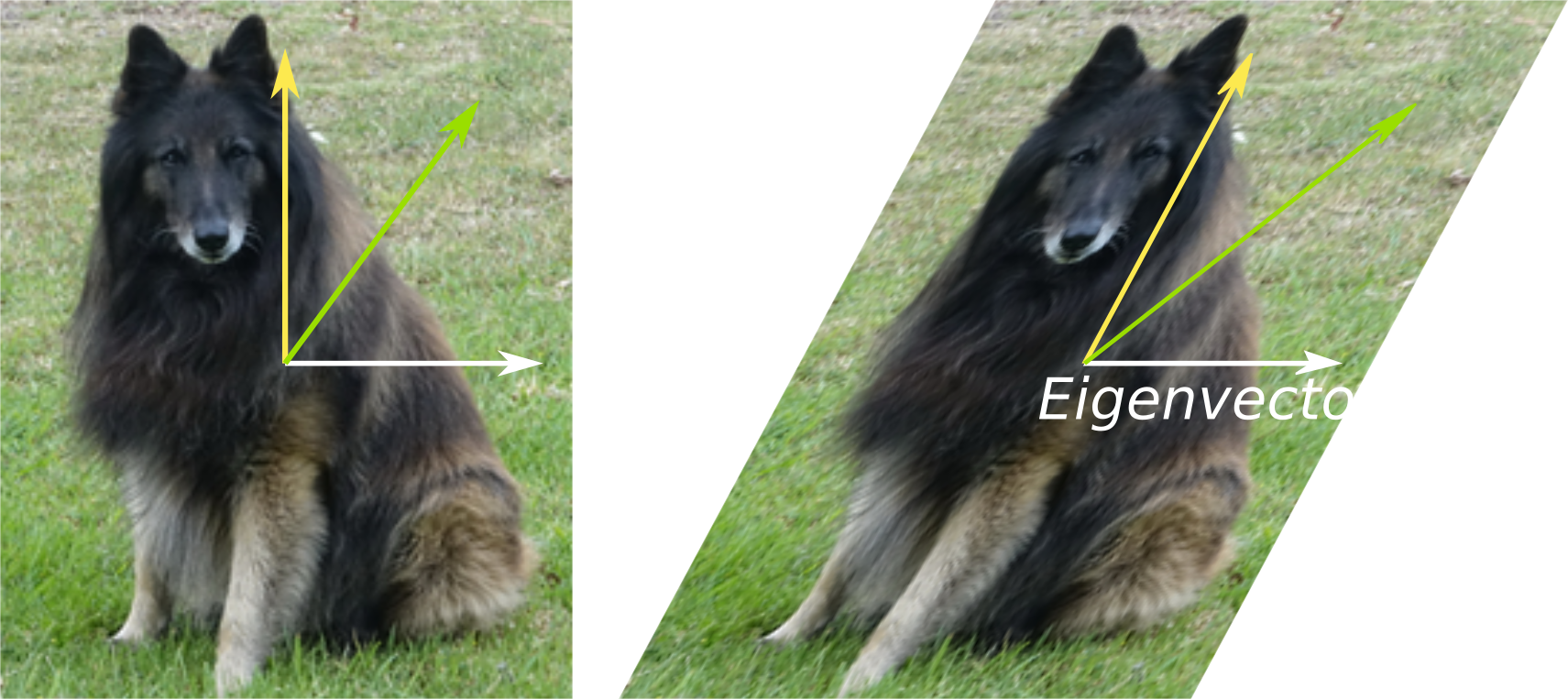
- 연산 규칙:
- $\mathrm{tr}(\mathbf{A})=\sum_{i=1}^{N}{\lambda_{i}}$
- $\mathrm{det}(\mathbf{A})=\prod_{i=1}^{N}{\lambda_{i}}$
- $\mathbf{A}\mathbf{v}=\lambda\mathbf{v} \quad \text{and} \quad \mathbf{A}^{T}\mathbf{w}=\lambda\mathbf{w}$
- $\lambda_{i}=0 \Rightarrow \nexists \mathbf{A}^{-1}$
- \(\lambda_{i} \ne \lambda_{j} \Rightarrow \alpha_{i}\mathbf{v}_{i} + \alpha_{j}\mathbf{v}_{j} \ne 0,\forall \alpha \ne 0\) \(\quad\)
-
특성 방정식(Characteristic Equation):
\[\begin{aligned} (\mathbf{A} - \lambda \mathbf{I})\mathbf{v} &=\mathbf{0},\quad \mathbf{v}\ne\mathbf{0} \end{aligned}\]- 정해: \(\nexists (\mathbf{A}-\lambda \mathbf{I})^{-1} \Leftrightarrow \exists \mathbf{v},\lambda\)
- 불능: \(\exists (\mathbf{A}-\lambda \mathbf{I})^{-1} \Leftrightarrow \nexists \mathbf{v},\lambda\)
Diagonalization
-
행렬의 대각화(Diagonalization): 정방행렬 \(\mathbf{A} \in \mathbb{R}^{N \times N}\) 에 대하여 \(\mathbf{P}^{-1}\mathbf{A}\mathbf{P}\) 가 대각행렬 \(\Lambda=\mathrm{diag}(\lambda_{1},\cdots,\lambda_{N})\) 이 되도록 만드는 정방행렬 \(\mathbf{P}(\ne \mathbf{0})\) 이 이 존재하는 경우
\[\begin{aligned} \mathbf{P}^{-1}\mathbf{A}\mathbf{P} &= \Lambda \\ &= \mathrm{diag}(\lambda_{1},\cdots,\lambda_{N}) \end{aligned}\]- \(\mathbf{P}\): 고유벡터 행렬 혹은 대각화 행렬
- \(\Lambda\): 고유값 대각 행렬
-
대칭행렬의 직교 대각화
- 대칭행렬 \(\mathbf{A} \in \mathbb{R}^{N \times N}\) 에 대하여 그 고유값이 \(\lambda_1,\lambda_2,\cdots,\lambda_n\) 이고, 고유벡터가 \(\mathbf{v}_{1},\mathbf{v}_{2},\cdots,\mathbf{v}_{N}\) 이라고 하자
-
\(\mathbf{A}\) 의 고유벡터 \(\mathbf{v}_{1},\mathbf{v}_{2},\cdots, \mathbf{v}_{N}\) 는 항상 직교함
\[\begin{aligned} \mathbf{v}_{1} \perp \mathbf{v}_{2} \perp \cdots \perp \mathbf{v}_{N} \end{aligned}\] -
\(\mathbf{A}\) 의 고유벡터들로 구성된 대각화 행렬 \(\mathbf{P}=\begin{bmatrix}\mathbf{v}_{1}&\mathbf{v}_{2}&\cdots&\mathbf{v}_{N}\end{bmatrix}\) 은 항상 직교행렬임
\[\begin{aligned} \mathbf{P}^{T} &=\mathbf{P}^{-1} \end{aligned}\] -
직교행렬 \(\mathbf{P}=\begin{bmatrix}\mathbf{v}_{1}&\mathbf{v}_{2}&\cdots&\mathbf{v}_{N}\end{bmatrix}\) 은 \(\mathbf{A}\) 를 그 고유값 \(\lambda_{1},\lambda_{2},\cdots,\lambda_{N}\) 으로 구성된 대각행렬 \(\Lambda\) 로 대각화시킴
\[\begin{aligned} \mathbf{P}^{-1}\mathbf{A}\mathbf{P} &= \Lambda \\ &= \mathrm{diag}(\lambda_1,\lambda_2,\cdots,\lambda_n) \end{aligned}\]