Neural Networks
Based on the following lectures
(1) “Intro. to Machine Learning (2023-2)” by Prof. Je Hyuk Lee, Dept. of Data Science, The Grad. School, Kookmin Univ.
(2) “Intro. to Deep Learning (2023-2)” by Prof. Seong Man An, Dept. of Data Science, The Grad. School, Kookmin Univ.
(3) “Text Analytics (2024-1)” by Prof. Je Hyuk Lee, Dept. of Data Science, The Grad. School, Kookmin Univ.
(4) “Vision AI (2024-1)” by Prof. Jong Hyuk Park, Dept. of Data Science, The Grad. School, Kookmin Univ.

Neural Networks
Perceptron
-
퍼셉트론(Perceptron) : 다수의 신호를 입력 받아 하나의 신호를 출력하는 알고리즘
\[\begin{aligned} y = \begin{cases} 0 \quad & \mathbf{w} \cdot \mathbf{x} \le \theta \\ 1 \quad & \mathbf{w} \cdot \mathbf{x} > \theta \\ \end{cases}, \quad x \in \{0,1\} \end{aligned}\]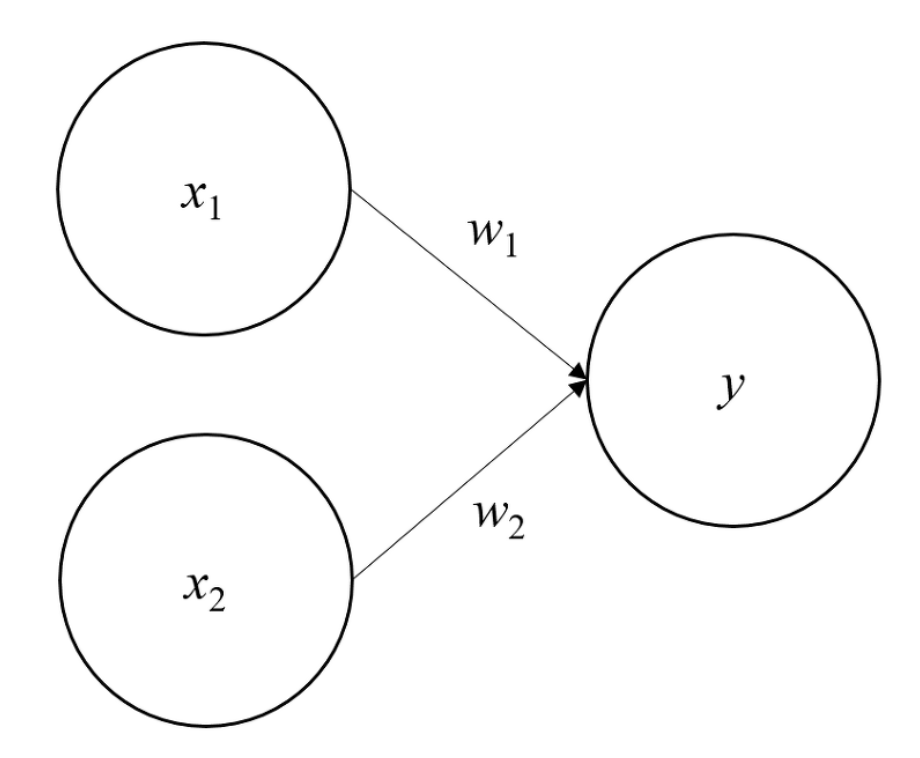
-
논리 회로(Logic Gate) : 하나 이상의 논리 입력을 받아 일정한 논리 연산을 거쳐 논리 출력을 얻는 회로
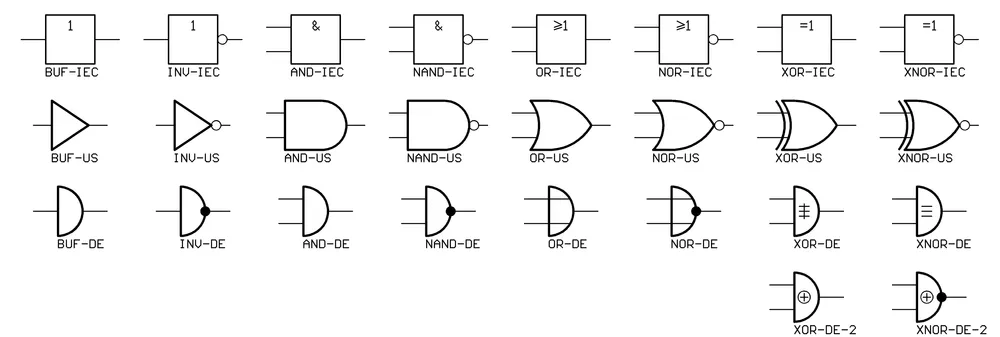
Gate Desc AND입력값이 모두 $1$ 이면 $1$ 을 출력함 OR입력값이 하나라도 $1$ 이면 $1$ 을 출력함 NOT입력값이 $0$ 이면 $1$ 을, $1$ 이면 $0$ 을 출력함 NAND입력값이 모두 $1$ 이면 $0$ 을 출력함 NOR입력값이 하나라도 $1$ 이면 $0$ 을 출력함 XOR입력값이 서로 다르면 $1$ 을, 같으면 $0$ 을 출력함 XNOR입력값이 서로 다르면 $0$ 을, 같으면 $1$ 을 출력함 -
MLP(
Multi-LayerPerceptron)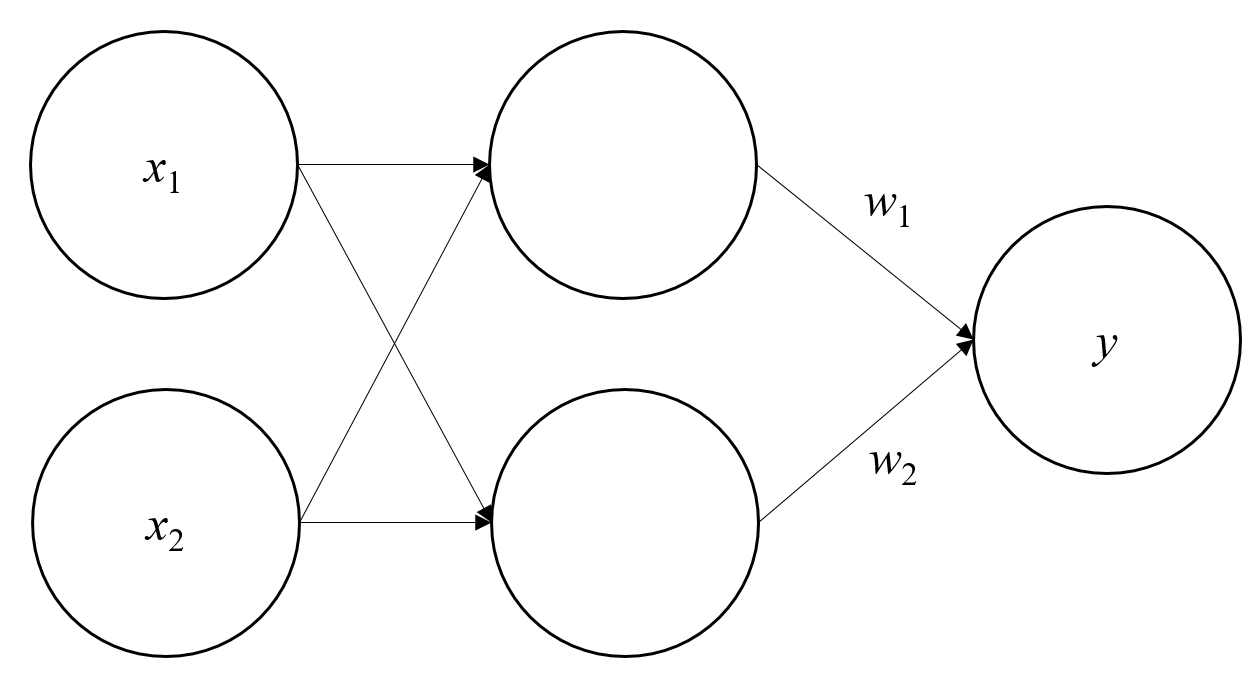
-
단층 퍼셉트론은 선형 분류기로서 게이트를 다양한 가중치 조합을 통해 표현할 수 있으나, 비선형 분류기를 요하는 일부 게이트(
XOR,XNOR)에 대해서는 표현이 불가능함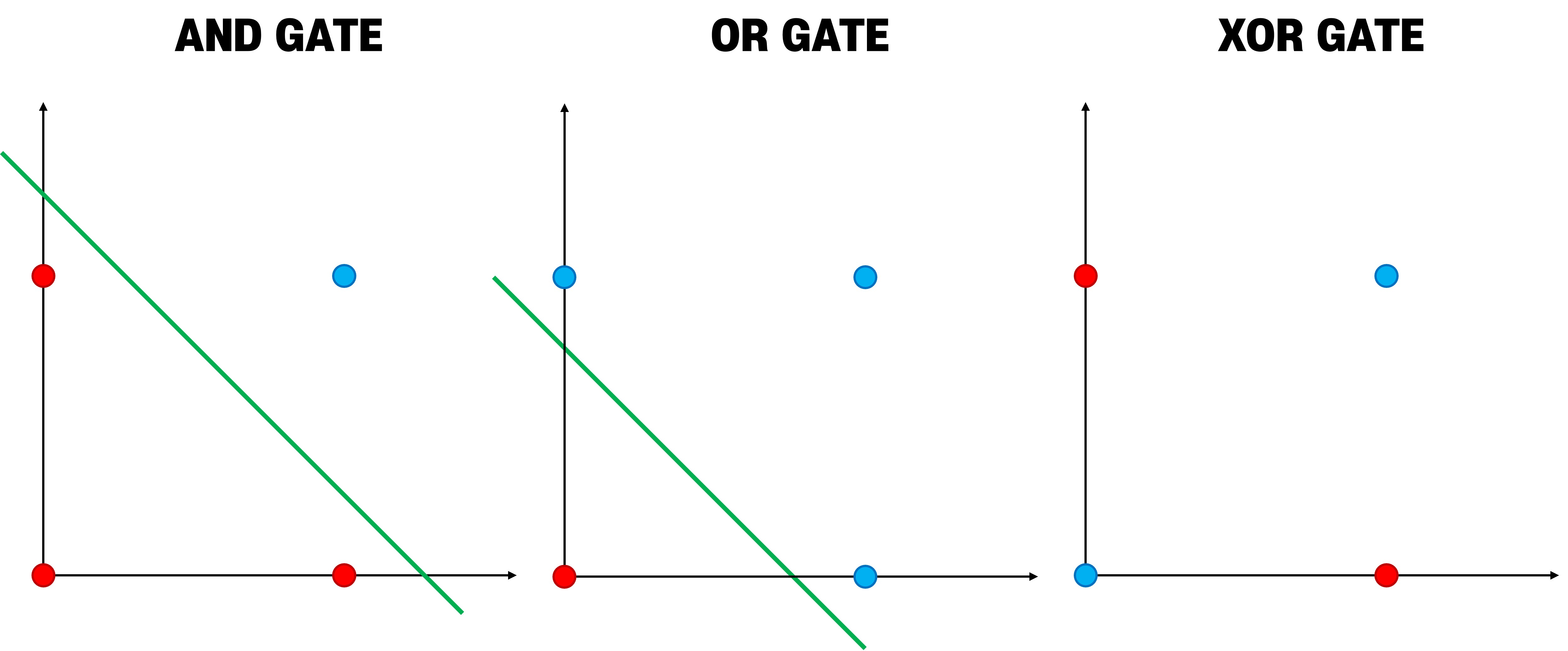
-
이는
NAND,OR,AND게이트를 표현하는 퍼셉트론들의 조합으로 표현할 수 있음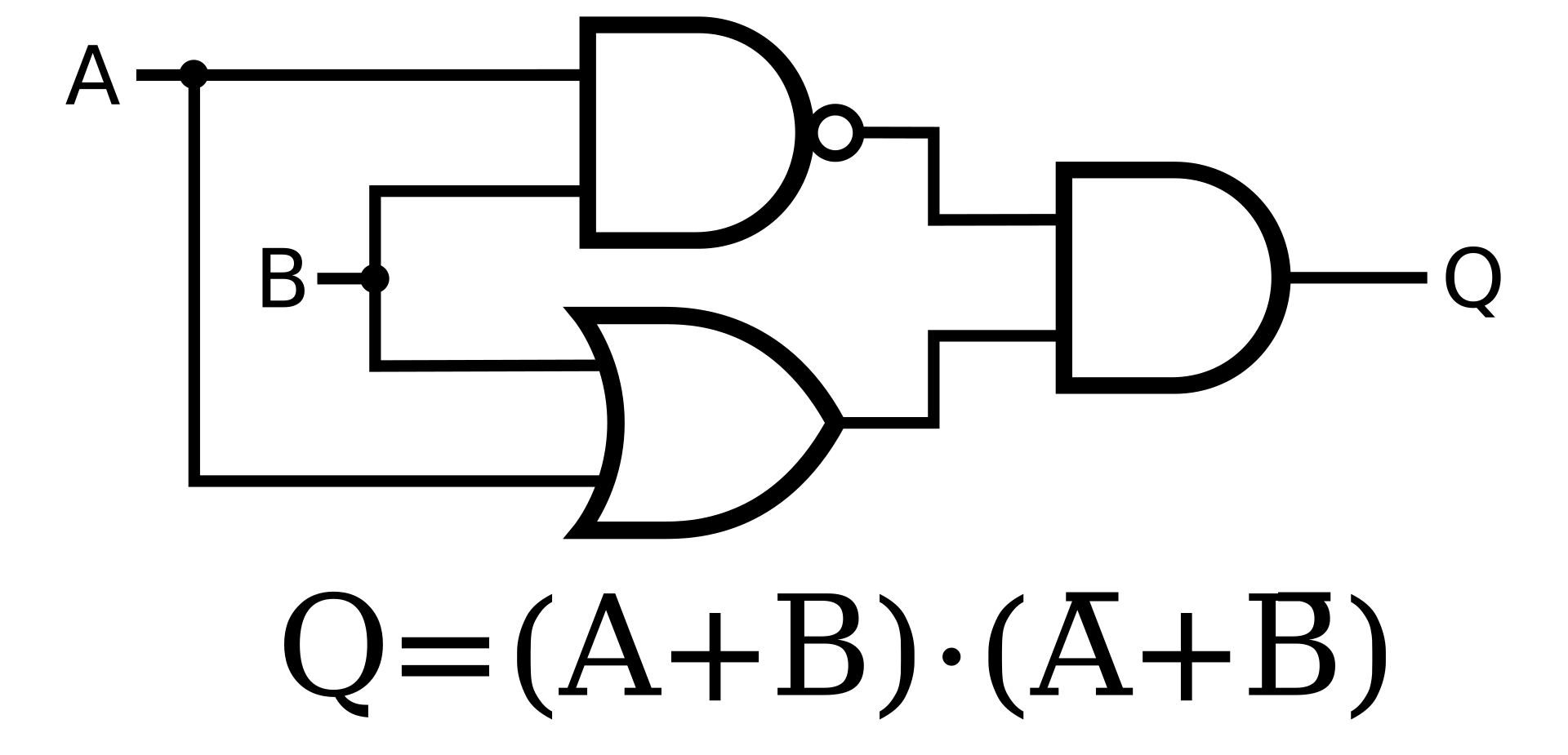
$X_{1}$ $X_{2}$ $Z_{1}$ NAND$Z_{2}$ OR$Y$ AND$0$ $0$ $1$ $0$ $0$ $0$ $1$ $1$ $1$ $1$ $1$ $0$ $1$ $1$ $1$ $1$ $1$ $0$ $1$ $0$
-
Neural Network
-
인공신경망(Artifical
NeuralNetwork) : 생물학적 신경망에서 영감을 얻은 통계학적 학습 알고리즘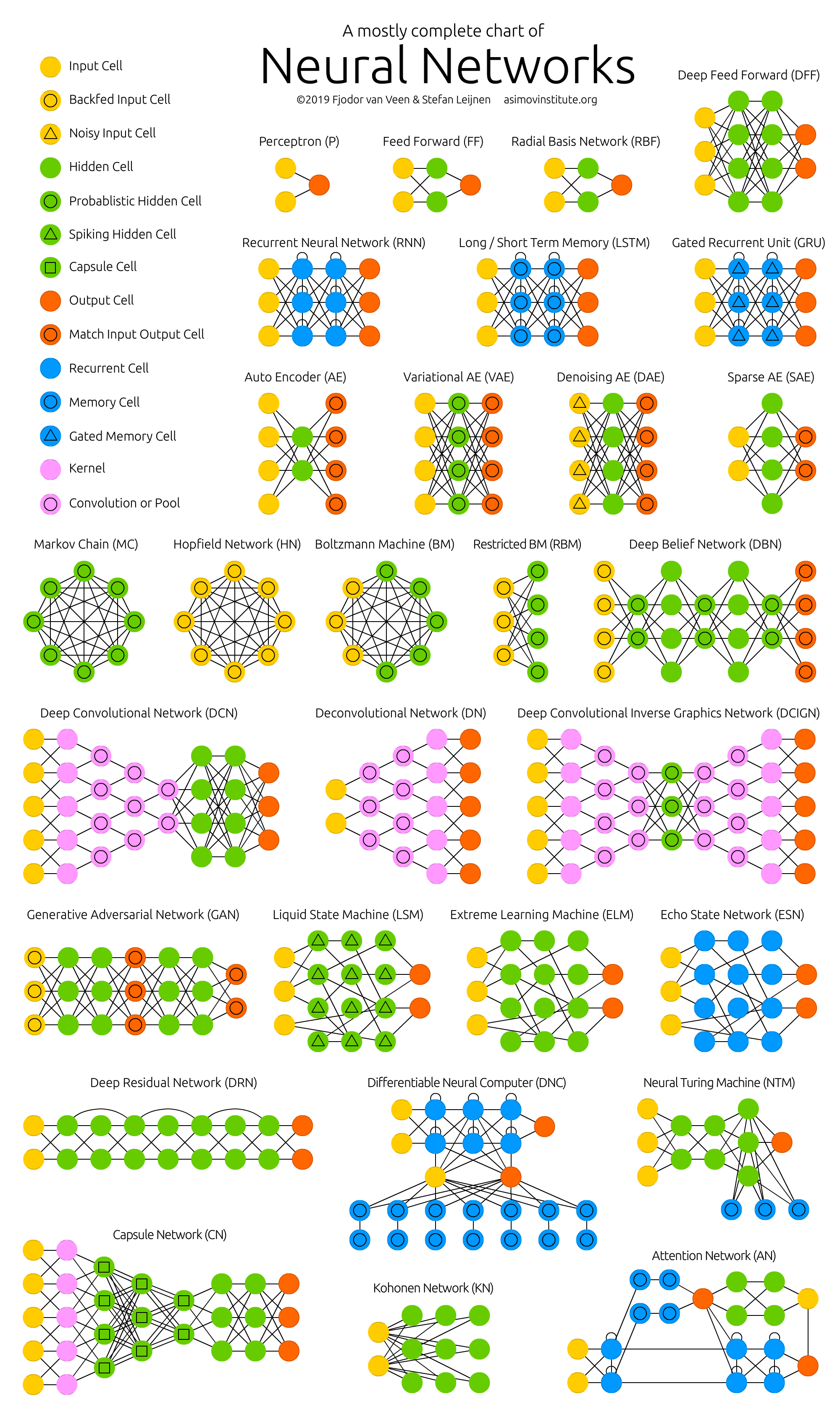
-
MLP(Multi-Layer Perceptron) is FC(
Fully-Connected) FFNN(Feed-ForwardNeuralNetwork)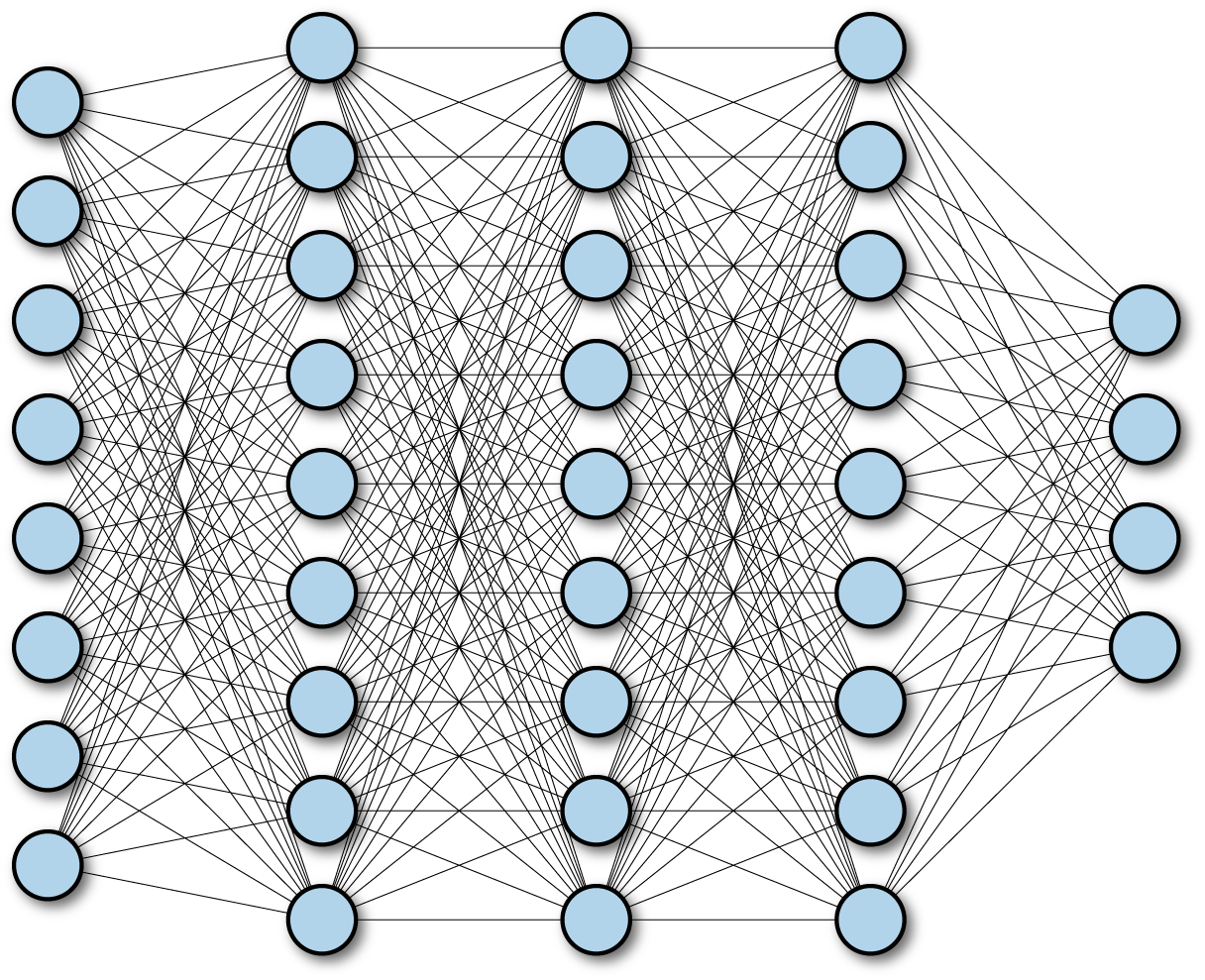
- Layer : 하나 이상의 퍼셉트론으로 구성된 모듈
- FC(
Fully-Connected) : 레이어의 모든 뉴런이 다음 레이어의 모든 뉴런과 연결된 상태 - FFNN(
Feed-ForwardNeuralNetwork) : 신호가 하나의 방향으로만 전달되는 인공신경망
-
MLP Definition
\[\begin{aligned} \hat{y} &= \text{MLP}(\mathbf{x})\\ &= F^{(N)} \circ \cdots \circ F^{(i)} \circ \cdots \circ F^{(1)}(\mathbf{x}) \end{aligned}\]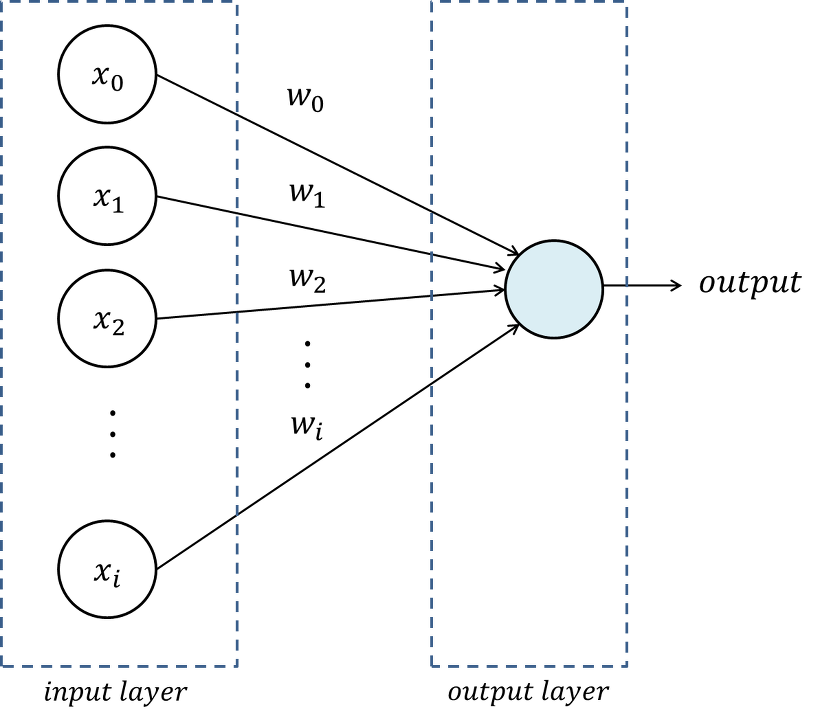
- $F^{(i)} = h \circ g$ : Single Layer
- \(\mathbf{y}^{(i)}\) : Activation Value
- $h(\mathbf{z}^{(i)})$ : Activation Function
- \(\mathbf{z}^{(i)}\) : Net Input
- \(g(\mathbf{y}^{(i-1)})=\mathbf{W}^{(i)} \cdot \mathbf{y}^{(i-1)} + \mathbf{b}^{(i)}\) : Summed Input Function or Weighted Sum Function
-
활성화 함수(Activation Function) : 다음 레이어 뉴런으로의 전달 여부를 판단하는 함수($h(\cdot)$)
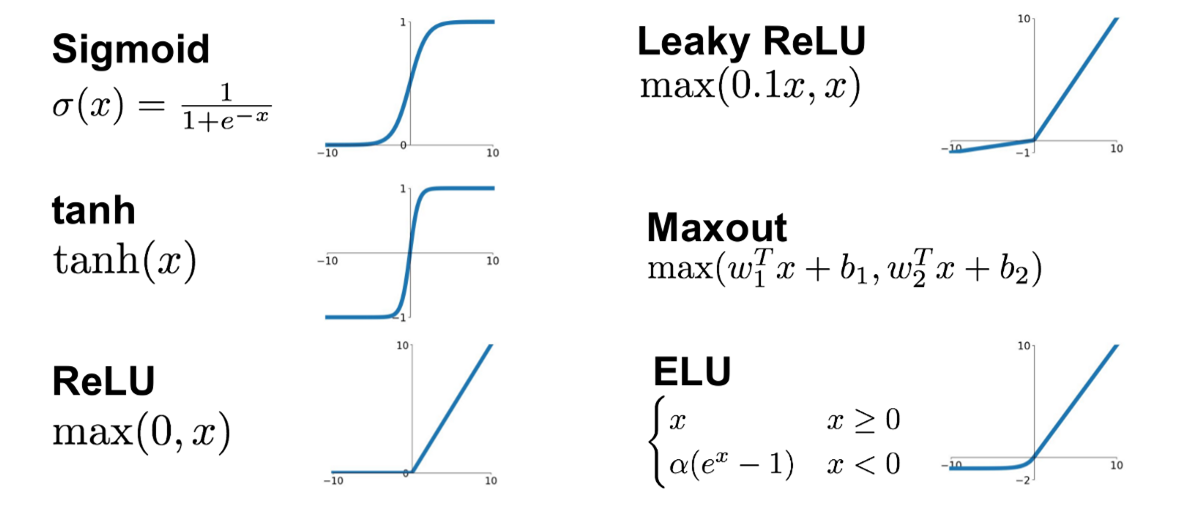
Function Output Step \(\text{step}(x)=\begin{cases} 1, \ \text{if} \ x>0 \\ 0, \ \text{otherwise} \end{cases}\) \(y \in \{0, 1\}\) Sigmoid \(\text{sigmoid}(x)=\displaystyle\frac{1}{1+e^{-x}}\) \(y \in [0, 1]\) TANH \(\begin{aligned}\text{tanh}(x)&=\frac{\text{sinh}(x)}{\text{cosh}(x)} \\ &=\frac{e^{x}-e^{-x}}{e^{x}+e^{-x}}\end{aligned}\) \(y \in [-1, 1]\) ReLU \(\text{ReLU}(x)=\max(0,x)\) \(y \in [0, \infty]\) Softmax \(\text{softmax}(x)_{i} = \displaystyle\frac{\exp{x_i}}{\sum_{j \ne i}{\exp{x_j}}}\) \(y \in [0, 1]\)
Backward Propagation
Gradient Descent
-
그라디언트(Gradient) : 다변수 함수에 대하여 모든 방향으로의 순간변화율 벡터
\[\begin{aligned} \nabla{f(x_{1},x_{2},\cdots,x_{n})} &= \begin{pmatrix} \displaystyle\frac{\partial f(x^{\forall})}{\partial x_{1}}\\ \displaystyle\frac{\partial f(x^{\forall})}{\partial x_{2}}\\ \vdots\\ \displaystyle\frac{\partial f(x^{\forall})}{\partial x_{n}}\\ \end{pmatrix} \end{aligned}\]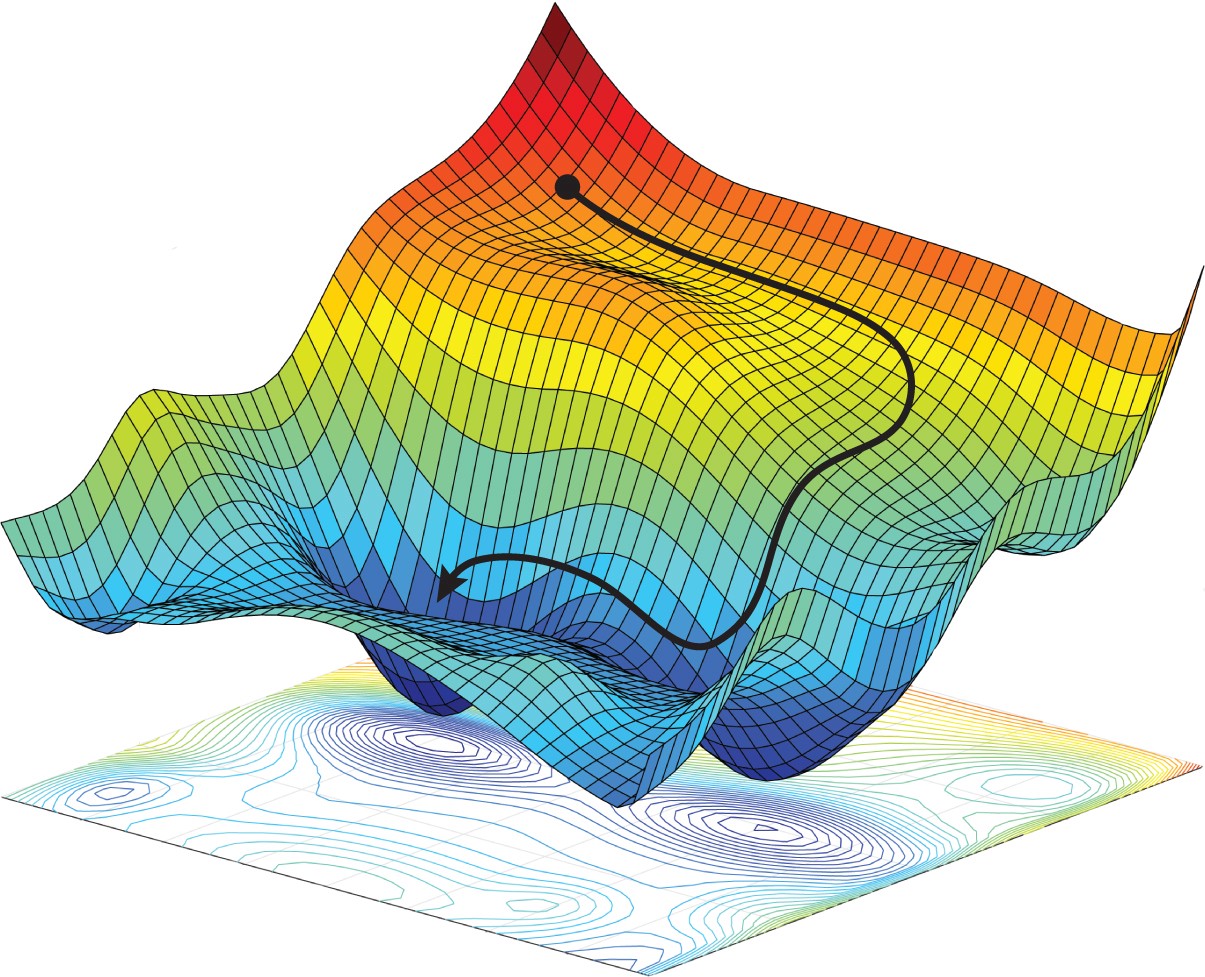
-
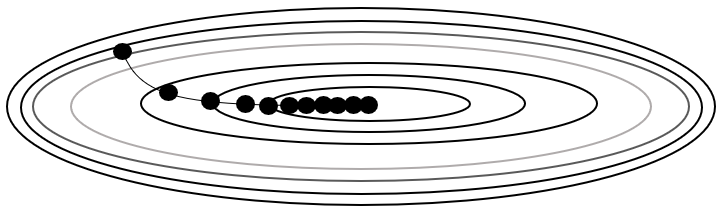
경사하강법(Gradient Descent) : 손실 함수의 도함수(그라디언트)를 최소화하는 가중치를 추정하는 방법
\[\begin{aligned} \Theta \gets \Theta - \eta \cdot \nabla_{\Theta}\mathcal{L} \end{aligned}\]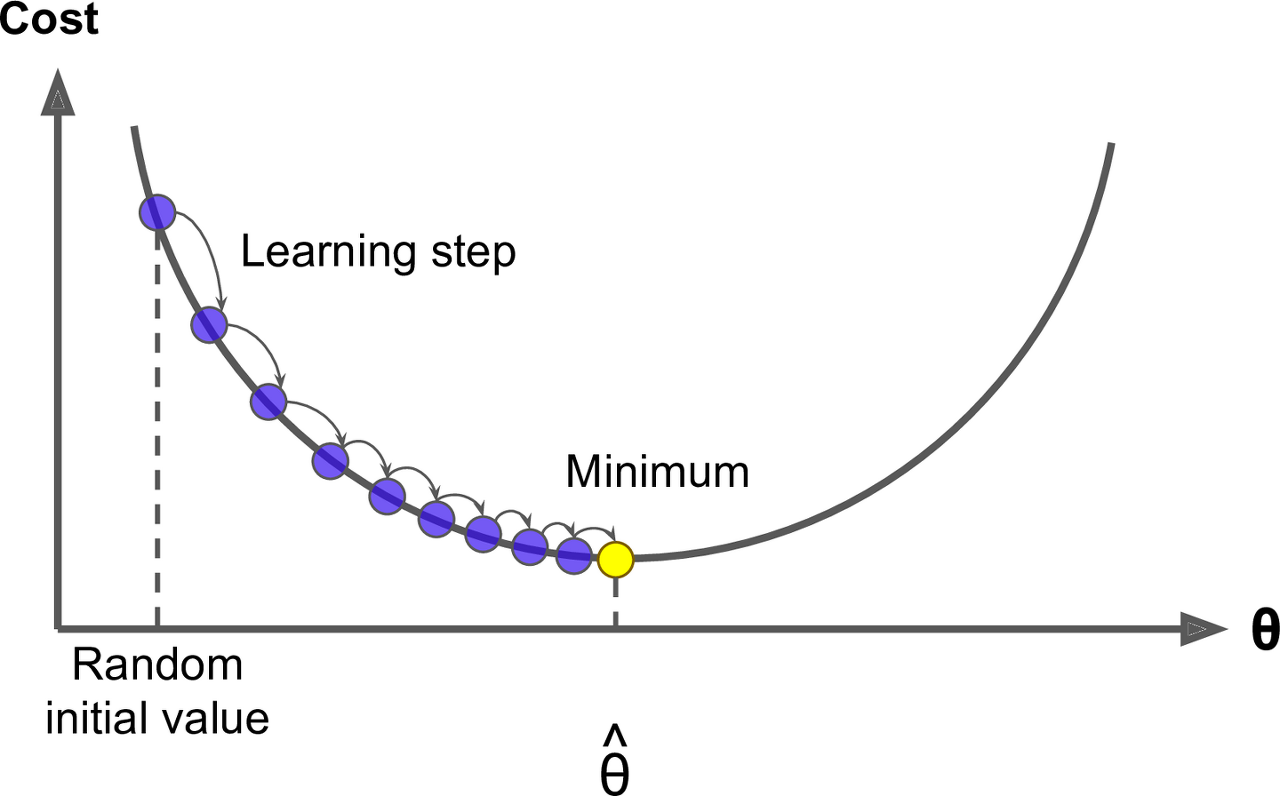
- $\Theta$ : Learning Parameter
- $\eta$ : Learning Rate or Learning Step
- $\nabla_{\Theta}\mathcal{L}$ : Gradient of the Loss Function is Learning Direction
Backward Propagation
-
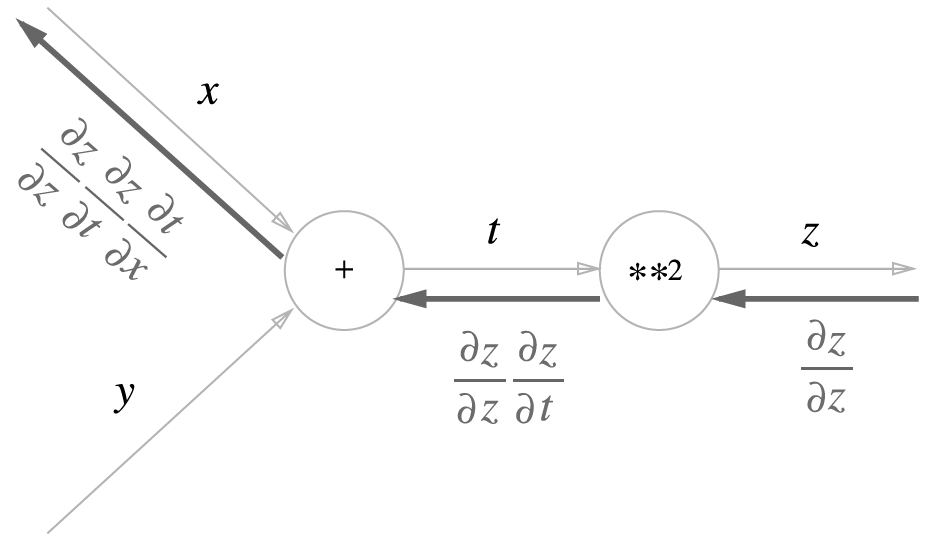
역전파(Backward Propagation) : 경사하강법을 활용하여 오차를 출력층에서 입력층 방향으로 전파하며 가중치를 조정하는 학습 방법
-
Learning Direction
-
손실 $\mathcal{L}$ 를 $1$ 번째 계층의 $1$ 번째 가중치 $w^{(1)}_{1}$ 에 대하여 미분하면 다음과 같음
\[\begin{aligned} \frac{\partial}{\partial w^{(1)}_{1}}\mathcal{L}(y,\hat{y}) &= \frac{\partial \mathcal{L}}{\partial\cancel{\mathbf{y}^{(N)}}} \times \frac{\partial\cancel{\mathbf{y}^{(N)}}}{\partial\cancel{\mathbf{z}^{(N)}}} \times \frac{\partial\cancel{\mathbf{z}^{(N)}}}{\partial\cancel{\mathbf{y}^{(N-1)}}} \times \cdots \times \frac{\partial\cancel{\mathbf{y}^{(1)}}}{\partial\cancel{\mathbf{z}^{(1)}}} \times \frac{\partial\cancel{\mathbf{z}^{(1)}}}{\partial w^{(1)}_{1}} \end{aligned}\] -
위 각 항목을 일반화하면 다음과 같음
\[\begin{aligned} \frac{\partial \mathcal{L}}{\partial \mathbf{y}^{(N)}} =1, \quad \frac{\partial \mathbf{y}^{(i)}}{\partial \mathbf{z}^{(i)}} =h^{\prime}(\mathbf{z}^{(i)}), \quad \frac{\partial \mathbf{z}^{(i)}}{\partial \mathbf{y}^{(i-1)}} =\mathbf{W}^{(i)}, \quad \frac{\partial \mathbf{z}^{(k)}}{\partial \mathbf{W}^{(k)}} =\mathbf{y}^{(k-1)} \end{aligned}\] -
따라서 파라미터 갱신 방향은 다음과 같이 일반화할 수 있음
\[\begin{aligned} \frac{\partial \mathcal{L}}{\partial \mathbf{W}^{(k)}} &= \mathbf{y}^{(k-1)} \times \prod_{i=k+1}^{N}{\mathbf{W}^{(i)}} \times \prod_{i=k}^{N}{h^{\prime}(\mathbf{z}^{(i)})} \end{aligned}\]
-
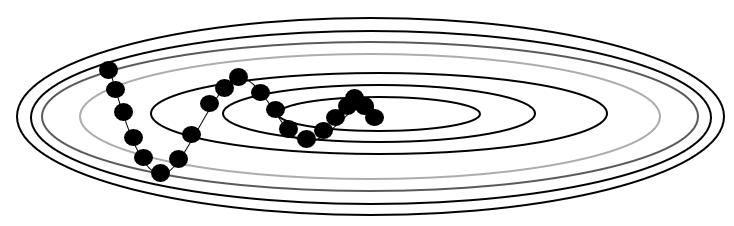
Optimizer
-
Update Learning Rate-based Approach
-
\[\begin{aligned} \Theta_{t} &= \Theta_{t-1} - \frac{\eta}{\sqrt{\phi_{t}}} \times \frac{\partial \mathcal{L}_{t-1}}{\partial \Theta_{t-1}}\\ \phi_{t} &= \phi_{t-1} + \frac{\partial \mathcal{L}_{t}}{\partial \Theta_{t}} \odot \frac{\partial \mathcal{L}_{t}}{\partial \Theta_{t}} \end{aligned}\]Adagrad: 이전까지 누적 갱신 규모를 반영하여 학습률을 결정함 -
\[\begin{aligned} \Theta_{t} &= \Theta_{t-1} - \frac{\eta}{\sqrt{\phi_{t}}} \times \frac{\partial \mathcal{L}_{t-1}}{\partial \Theta_{t-1}}\\ \phi_{t} &= \rho \cdot \phi_{t-1} + (1-\rho) \cdot \frac{\partial \mathcal{L}_{t}}{\partial \Theta_{t}} \odot \frac{\partial \mathcal{L}_{t}}{\partial \Theta_{t}} \end{aligned}\]RMSProp: 이전까지 누적 갱신 규모를 지수가중이동평균하여 반영하여 학습률을 결정함
-
-
Update Learning Direction-based Approach
-
\[\begin{aligned} \Theta_{t} &= \Theta_{t-1} - \phi_{t}\\ \phi_{t} &= \eta \cdot \frac{\partial \mathcal{L}_{t-1}}{\partial \Theta_{t-1}} + \gamma \cdot \phi_{t-1} \end{aligned}\]Momentum: 직전 시점 갱신 방향을 관성 계수($\gamma$)만큼 반영하여 갱신 방향을 결정함
-
Sourse
- https://codetorial.net/tensorflow/basics_of_optimizer.html
- https://namu.wiki/jump/JsjHPjk9qYK%2Fl54QLaGyq5jupzXBHwWbSS0dMWuO%2B3lzPTdSDH1TiTY1jg9ysGRCY1f5J8NIWqRsnWauQXGsLQ%3D%3D
- https://gentlesark.tistory.com/44
- https://www.asimovinstitute.org/neural-network-zoo/
- https://www.oreilly.com/library/view/tensorflow-for-deep/9781491980446/ch04.html
- https://towardsdatascience.com/an-intuitive-explanation-of-gradient-descent-83adf68c9c33